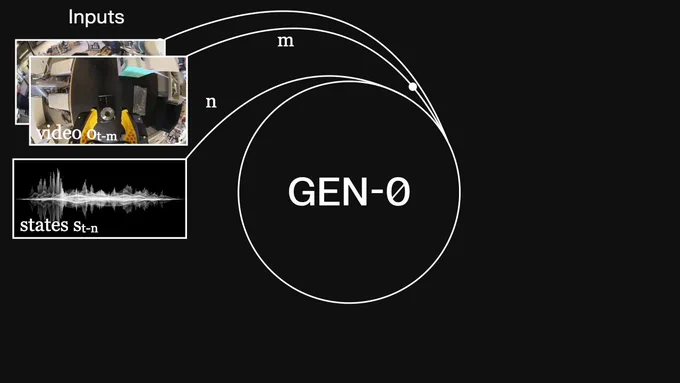
Introducing GEN-0, our latest 10B+ foundation model for robots
⏱️ built on Harmonic Reasoning, new architecture that can think & act seamlessly
📈 strong scaling laws: more pretraining & model size = better
🌍 unprecedented corpus of 270,000+ hrs of dexterous data
Read more 👇
Nov 4, 2025 · 4:13 PM UTC
Surpassing the intelligence threshold 🧠 in the high-data regime for robotics, we observe a phase transition ⚡️ at 7B params where smaller models exhibit ossification under data overload, while larger ones continue to improve and can quickly adapt to new tasks.

Robotics at Generalist is no longer limited by data.
GEN-0 is pretrained on our growing dataset of over 270,000 hrs of real, diverse manipulation data (10,000 hrs/week & accelerating).
1,000s of data collection devices/robots in homes, warehouses, and workplaces worldwide🏠🏭💼

We’ve developed a new approach to training models, Harmonic Reasoning, which creates a "harmonic" interplay between asynchronous, continuous-time streams of sensing and acting tokens. ⚙️🎵
Watch GEN-0 pack a camera. 🤖📸

GEN-0 models exhibit strong scaling laws, in which more pretraining data and compute consistently (and predictably) improve downstream post-training performance of the model across many tasks. 🔬📈🧠

📱Packing the phone into the box: here GEN-0 is tasked with gently packing a phone (including its accessory box) into a snug-fit retail box. Slotting in the phone, inserting the accessory box, flipping, and closing the lid, with all tight fits.

📦🧠🤖🔄 Packing unseen objects - this evaluates GEN-0's generalization and “physical commonsense": reasoning over the highly varied geometry and physics of new objects, nudging and reorienting, packing in differently depending on shape, pushing objects around to make space.

Cross-Embodiment – GEN-0 architecture works on different robots by design. We have tested our models on various 6DoF, 7DoF, and 16+DoF semi-humanoid robots.

To scale GEN-0 capabilities, we are constructing the largest and most diverse real-world manipulation dataset ever built 🌍 including every manipulation task humans can think of – from peeling potatoes, to threading bolts – spanning homes, bakeries, warehouses, factories, & more

Read more in our blog post, including early notes from large-scale ablations on our pretraining data.
Blog: generalistai.com/blog/nov-04…